






24
Jul
Monarch矩阵:计算高效的稀疏型矩阵分解
By 苏剑林 | 2024-07-24 | 1765位读者 | 引用在矩阵压缩这个问题上,我们通常有两个策略可以选择,分别是低秩化和稀疏化。低秩化通过寻找矩阵的低秩近似来减少矩阵尺寸,而稀疏化则是通过减少矩阵中的非零元素来降低矩阵的复杂性。如果说SVD是奔着矩阵的低秩近似去的,那么相应地寻找矩阵稀疏近似的算法又是什么呢?
接下来我们要学习的是论文《Monarch: Expressive Structured Matrices for Efficient and Accurate Training》,它为上述问题给出了一个答案——“Monarch矩阵”,这是一簇能够分解为若干置换矩阵与稀疏矩阵乘积的矩阵,同时具备计算高效且表达能力强的特点,论文还讨论了如何求一般矩阵的Monarch近似,以及利用Monarch矩阵参数化LLM来提高LLM速度等内容。
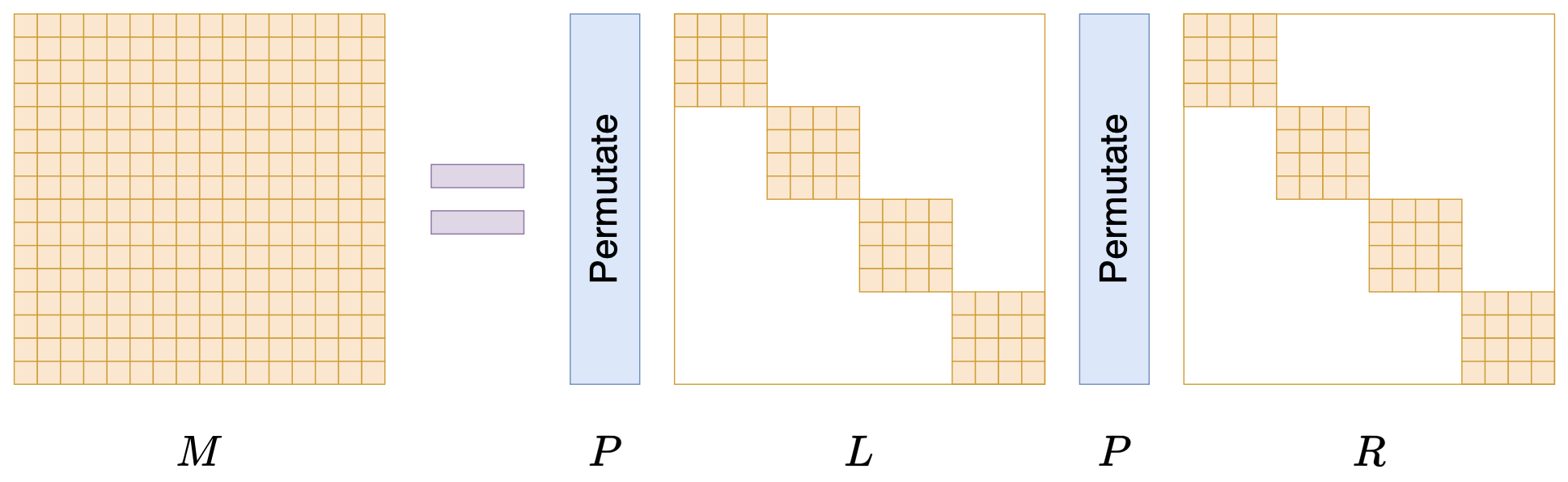
Monarch矩阵形式M=PLPR
值得指出的是,该论文的作者也正是著名的Flash Attention的作者Tri Dao,其工作几乎都在致力于改进LLM的性能,这篇Monarch也是他主页上特意展示的几篇论文之一,单从这一点看就非常值得学习一番。
20
Jun
重温SSM(三):HiPPO的高效计算(S4)
By 苏剑林 | 2024-06-20 | 9500位读者 | 引用前面我们用两篇文章《重温SSM(一):线性系统和HiPPO矩阵》和《重温SSM(二):HiPPO的一些遗留问题》介绍了HiPPO的思想和推导——通过正交函数基对持续更新的函数进行实时逼近,其拟合系数的动力学正好可以表示为一个线性ODE系统,并且对于特定的基底以及逼近方式,我们可以将线性系统的关键矩阵精确地算出来。此外,我们还讨论了HiPPO的离散化和相关性质等问题,这些内容奠定了后续的SSM工作的理论基础。
接下来,我们将介绍HiPPO的后续应用篇《Efficiently Modeling Long Sequences with Structured State Spaces》(简称S4),它利用HiPPO的推导结果作为序列建模的基本工具,并从新的视角探讨了高效的计算和训练方式,最后在不少长序列建模任务上验证了它的有效性,可谓SSM乃至RNN复兴的代表作之一。
基本框架
S4使用的序列建模框架,是如下的线性ODE系统:
\begin{equation}\begin{aligned}
x'(t) =&\, A x(t) + B u(t) \\
y(t) =&\, C^* x(t) + D u(t)
\end{aligned}\end{equation}
28
Dec
Transformer升级之路:6、旋转位置编码的完备性分析
By 苏剑林 | 2022-12-28 | 30778位读者 | 引用在去年的文章《Transformer升级之路:2、博采众长的旋转式位置编码》中,笔者提出了旋转位置编码(RoPE),当时的出发点只是觉得用绝对位置来实现相对位置是一件“很好玩的事情”,并没料到其实际效果还相当不错,并为大家所接受,不得不说这真是一个意外之喜。后来,在《Transformer升级之路:4、二维位置的旋转式位置编码》中,笔者讨论了二维形式的RoPE,并研究了用矩阵指数表示的RoPE的一般解。
既然有了一般解,那么自然就会引出一个问题:我们常用的RoPE,只是一个以二维旋转矩阵为基本单元的分块对角矩阵,如果换成一般解,理论上效果会不会更好呢?本文就来回答这个问题。
指数通解
在《Transformer升级之路:4、二维位置的旋转式位置编码》中,我们将RoPE抽象地定义为任意满足下式的方阵
\begin{equation}\boldsymbol{\mathcal{R}}_m^{\top}\boldsymbol{\mathcal{R}}_n=\boldsymbol{\mathcal{R}}_{n-m}\label{eq:re}\end{equation}
2
Nov
利用CUR分解加速交互式相似度模型的检索
By 苏剑林 | 2022-11-02 | 21652位读者 | 引用文本相似度有“交互式”和“特征式”两种做法,想必很多读者对此已经不陌生,之前笔者也写过一篇文章《CoSENT(二):特征式匹配与交互式匹配有多大差距?》来对比两者的效果。总的来说,交互式相似度效果通常会好些,但直接用它来做大规模检索是不现实的,而特征式相似度则有着更快的检索速度,以及稍逊一筹的效果。
因此,如何在保证交互式相似度效果的前提下提高它的检索速度,是学术界一直都有在研究的课题。近日,论文《Efficient Nearest Neighbor Search for Cross-Encoder Models using Matrix Factorization》提出了一份新的答卷:CUR分解。

CUR分解示意图
9
Aug
线性Transformer应该不是你要等的那个模型
By 苏剑林 | 2021-08-09 | 86314位读者 | 引用在本博客中,我们已经多次讨论过线性Attention的相关内容。介绍线性Attention的逻辑大体上都是:标准Attention具有$\mathcal{O}(n^2)$的平方复杂度,是其主要的“硬伤”之一,于是我们$\mathcal{O}(n)$复杂度的改进模型,也就是线性Attention。有些读者看到线性Attention的介绍后,就一直很期待我们发布基于线性Attention的预训练模型,以缓解他们被BERT的算力消耗所折腾的“死去活来”之苦。
然而,本文要说的是:抱有这种念头的读者可能要失望了,标准Attention到线性Attention的转换应该远远达不到你的预期,而BERT那么慢的原因也并不是因为标准Attention的平方复杂度。
BERT之反思
按照直观理解,平方复杂度换成线性复杂度不应该要“突飞猛进”才对嘛?怎么反而“远远达不到预期”?出现这个疑惑的主要原因,是我们一直以来都没有仔细评估一下常规的Transformer模型(如BERT)的整体计算量。
8
Jul
两个多元正态分布的KL散度、巴氏距离和W距离
By 苏剑林 | 2021-07-08 | 86577位读者 | 引用正态分布是最常见的连续型概率分布之一。它是给定均值和协方差后的最大熵分布(参考《“熵”不起:从熵、最大熵原理到最大熵模型(二)》),也可以看作任意连续型分布的二阶近似,它的地位就相当于一般函数的线性近似。从这个角度来看,正态分布算得上是最简单的连续型分布了。也正因为简单,所以对于很多估计量来说,它都能写出解析解来。
本文主要来计算两个多元正态分布的几种度量,包括KL散度、巴氏距离和W距离,它们都有显式解析解。
正态分布
这里简单回顾一下正态分布的一些基础知识。注意,仅仅是回顾,这还不足以作为正态分布的入门教程。
概率密度
正态分布,也即高斯分布,是定义在$\mathbb{R}^n$上的连续型概率分布,其概率密度函数为
\begin{equation}p(\boldsymbol{x})=\frac{1}{\sqrt{(2\pi)^n \det(\boldsymbol{\Sigma})}}\exp\left\{-\frac{1}{2}(\boldsymbol{x}-\boldsymbol{\mu})^{\top}\boldsymbol{\Sigma}^{-1}(\boldsymbol{x}-\boldsymbol{\mu})\right\}\end{equation}
5
Jun
从一个单位向量变换到另一个单位向量的正交矩阵
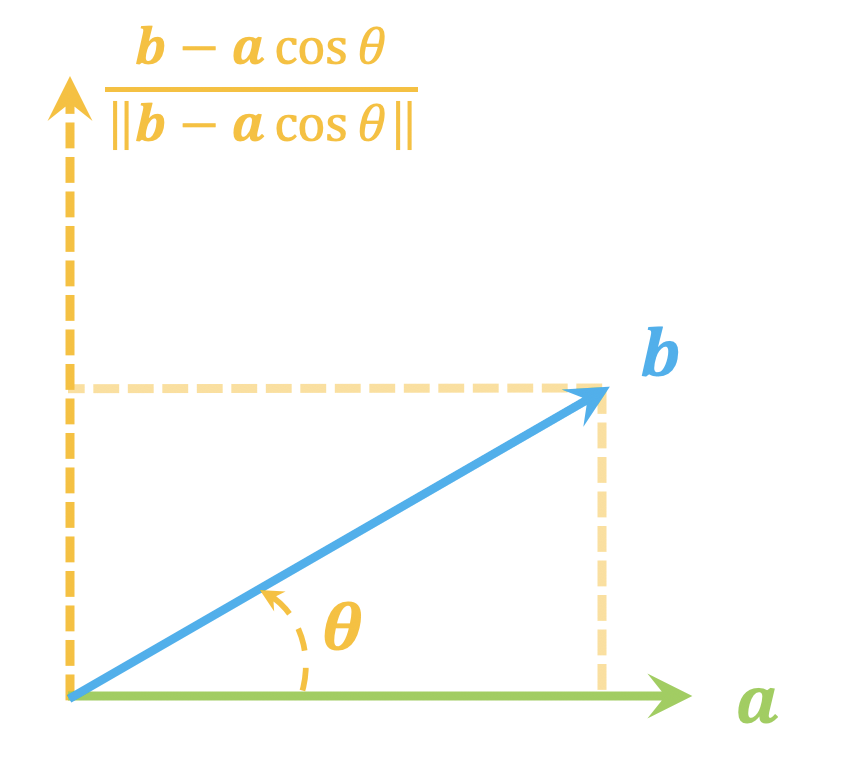
By 苏剑林 | 2021-06-05 | 35941位读者 | 引用这篇文章我们来讨论一个比较实用的线性代数问题:
给定两个$d$维单位(列)向量$\boldsymbol{a},\boldsymbol{b}$,求一个正交矩阵$\boldsymbol{T}$,使得$\boldsymbol{b}=\boldsymbol{T}\boldsymbol{a}$。
由于两个向量模长相同,所以很显然这样的正交矩阵必然存在,那么,我们怎么把它找出来呢?
二维
不难想象,这本质上就是$\boldsymbol{a},\boldsymbol{b}$构成的二维子平面下的向量变换(比如旋转或者镜面反射)问题,所以我们先考虑$d=2$的情形。
正交分解示意图
10
May
Transformer升级之路:4、二维位置的旋转式位置编码
By 苏剑林 | 2021-05-10 | 75530位读者 | 引用在之前的文章《Transformer升级之路:2、博采众长的旋转式位置编码》中我们提出了旋转式位置编码RoPE以及对应的Transformer模型RoFormer。由于笔者主要研究的领域还是NLP,所以本来这个事情对于笔者来说已经完了。但是最近一段时间,Transformer模型在视觉领域也大火,各种Vision Transformer(ViT)层出不穷,于是就有了问题:二维情形的RoPE应该是怎样的呢?
咋看上去,这个似乎应该只是一维情形的简单推广,但其中涉及到的推导和理解却远比我们想象中复杂,本文就对此做一个分析,从而深化我们对RoPE的理解。
二维RoPE
什么是二维位置?对应的二维RoPE又是怎样的?它的难度在哪里?在这一节中,我们先简单介绍二维位置,然后直接给出二维RoPE的结果和推导思路,在随后的几节中,我们再详细给出推导过程。

最近评论